PID 调参有感
撰写人:Keruone
时间:2025.3.23
前言
本人并非自动化专业的学生,只是在调参时有所感悟,遂下笔记录此事。
本人前段时间在调整小车循迹的PID,突有灵光一现。
也因非对口专业,若有理论问题,欢迎指正。
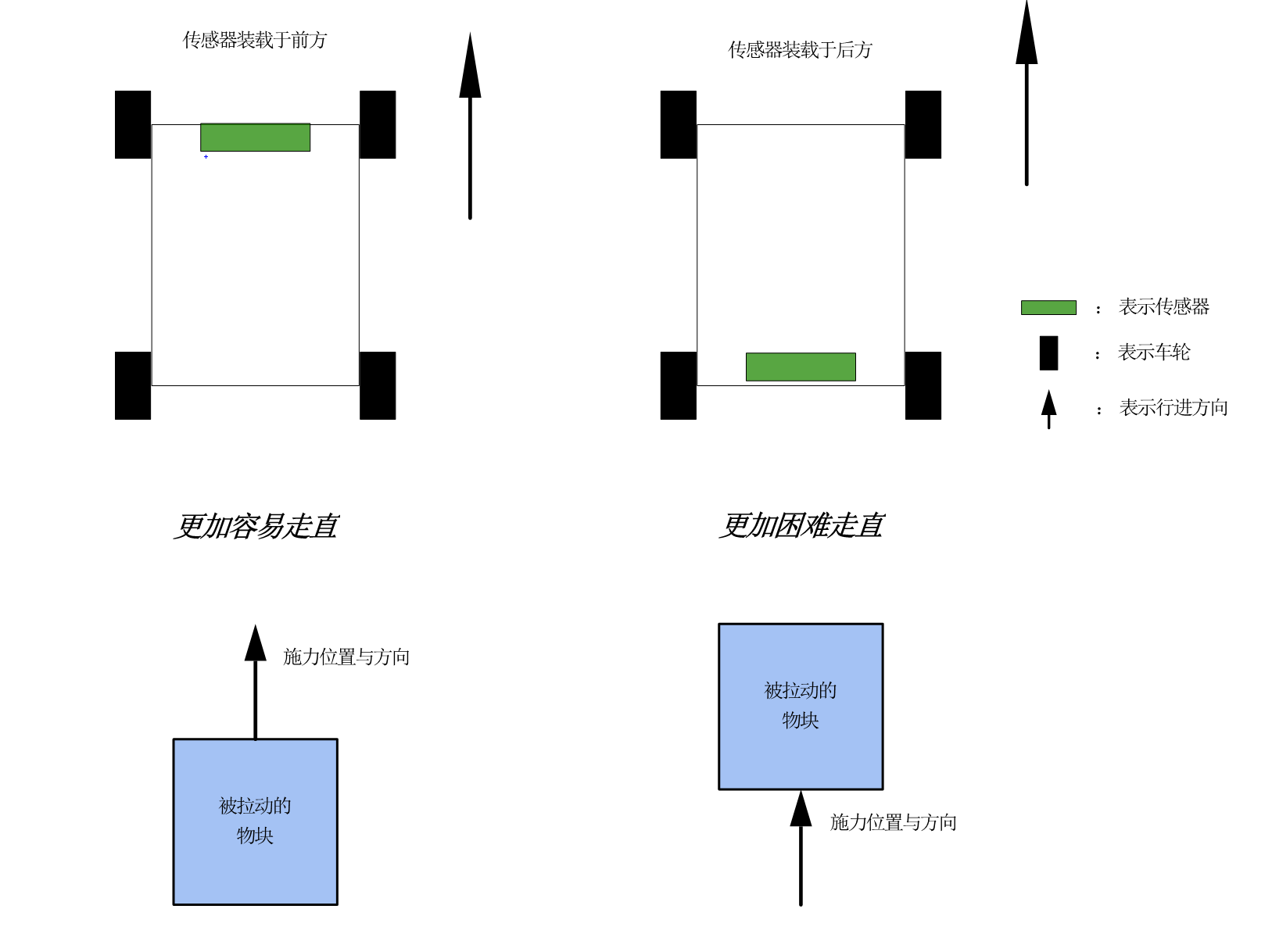
关于 PID 传感器的位置
传感器装载于行驶轨迹的前方会明显比后方会好调整(这在自动化控制中似乎是有什么专业术语描述)。
- 但我只是有种直觉,觉得这就跟人力运送货物一般:
- 如果你沿着行进方向,从前拉动物块,物块会很轻易的沿着你的轨迹移动;
- 如果你沿着行进方向,从后推动物块,物块则会更加容易偏转你的移动轨迹,若需要其沿着你所指定的轨迹,你需要花费更多的精力。
- 传感器同理:
- 如果你的传感器装载于动力供给等效中心的前方,你的 PID 会更加容易控制
- 如果你的传感器装载于动力供给等效中心的后方,你调节 PID 会更加容易吃力,且不稳。
关于 PID 参数含义的思考
或许我们在很多地方都遇见过比例、积分、微分的称呼,也看过很多云里雾里的解释,但实际上手的时候,可能我们更多的还是在“凑”参数,对PID的实际效果还是不太理解。
- 在小车调试中:
- P:让小车尽可能地贴近行进路线
- D:让小车车身尽可能地平行于行进路线
- I:防止小车最终始终与行进路线存在一个横向的误差
对于传感器装载于前方,可以发现:
– 对于P,过于直观易懂,略。
– 对于D,我们不妨假设:1. 小车向右的误差为正,向左的误差为负;2. 对于正向的误差,会在车头产生一个向左的力,对于负向的误差,会在车头产生一个向右的力;3.下文的误差记为有符号数,右侧为正,左侧为负。开始推断:
– 当我们的小车相较于行进方向,车身朝向向右偏转时(只考虑角度,不考虑与循迹线来说偏左还是偏右,而是考虑朝向左或朝向右)。此时,可以想象得到下一刻的的误差会比当前更大。此时,误差差值为正数,则会产生一个向左的力;
– 当我们的小车相较于行进方向,车身朝向向左偏转时(只考虑角度,不考虑与循迹线来说偏左还是偏右,而是考虑朝向左或朝向右)。此时,可以想象得到下一刻的的误差会比当前更小。此时,误差差值为负数,则会产生一个向右的力。
– 综上,D 有使车辆平行于行进轨迹的趋势。
– 对于I,暂时没有什么独到的理解,仍持与互联网中相同的见解。